Abstrakt
V tejto práci sa venujeme štúdiu modelu ramien manipulátora v gravitačnom poli a v prítomnosti disipatívnych síl. S ohľadom na prítomnosť disipácie sme sa snažili systematicky pristupovať k návrhu pohonu motorov ramien mechanického manipulátora tak, aby straty vznikajúce trením boli minimálne.
1. Úvod
V technickej praxi sa často stretávame s potrebou optimalizácie pohybu mechanickej sústavy. Optimalizovať pohyb sústavy znamená nájsť taký pohyb, pri ktorom straty, ktoré vznikajú trením v sústave, sú minimálne. V našom prípade je mechanická sústava tvorená jednoduchým dvojramenným manipulátorom, ktorý sa môže pohybovať v rovine Obr. 1. Ramená sú ovládané motormi, ktoré slúžia na ich premiestňovanie medzi zvolenými okrajovými polohami. Našou úlohou je navrhnúť pohon motorov ramien tak, aby pri pohybe manipulátora boli straty vznikajúce trením minimálne.
2. Lagrangeove rovnice pre sústavu telies
Pohybové rovnice sústavy napíšeme pomocou Lagrangeovych rovníc, ktoré sú jednoduchšie v krivočiarych súradniciach ako Newtonove rovnice [1,3]. V Lagrangeovom formalizme je mechanická sústava charakterizovaná funkciou, ktorá sa nazýva Lagrangeova funkcia:
![]() (1)
(1)
![]() je vektor zovšeobecnených súradníc,
je vektor zovšeobecnených súradníc, ![]() je
vektor zovšeobecnených rýchlostí, T je kinetická a U
potenciálna energia sústavy. V našom prípade za zovšeobecnené
súradnice zvolíme uhly φ1 a φ2, ktoré
zvierajú ramená manipulátora s vertikálou Obr. 1.
je
vektor zovšeobecnených rýchlostí, T je kinetická a U
potenciálna energia sústavy. V našom prípade za zovšeobecnené
súradnice zvolíme uhly φ1 a φ2, ktoré
zvierajú ramená manipulátora s vertikálou Obr. 1.
Obr. 1. Definícia zovšeobecnených súradníc φ1 a φ2 pre model ramien manipulátora. V kĺboch O1, O2 sú motory, ktoré určujú pohyb ramien.
Lagrangeove rovnice majú tvare:
![]() (2)
(2)
Z matematického hľadiska rovnice (2) tvoria
sústavu rovníc druhého rádu pre neznáme funkcie ![]() .
.
2.1. Pohybové rovnice ramien manipulátora
V našom prípade môžeme Lagrangeovu funkciu napísať v tvare:
 (3)
(3)
kde I1, I2 sú momenty zotrvačnosti ramien okolo ich ťažísk, m1, m2 hmotnosti a l1, l2 dĺžky ramien. Z Lagrangeovych rovníc (2) dostávame pohybové rovnice pre ramená manipulátora:
![]() (4),
(4),
kde ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
Tieto pohybové rovnice platia pre uzavretú sústavu. V našom prípade však sústava nie je uzavretá, pretože uvažujeme disipatívne sily, ktoré pôsobia proti pohybu manipulátora a vonkajšie momenty síl, ktorých zdrojmi sú motory. Ak tieto momenty síl zahrnieme do pohybových rovníc, potom platí:
![]() (5)
(5)
kde b1 , b2 sú koeficienty trenia a D1 , D2 sú momenty síl od motorov. Na riešenie týchto diferenciálnych rovníc sme použili Runge-Kutta metódu štvrtého rádu [2].
3. Optimalizácia pohybu manipulátora
Ak chceme optimalizovať pohyb manipulátora musíme nájsť také momenty síl D1 , D2 , ktorými pôsobia motory na ramená manipulátora, aby celková práca vykonaná na sústave bola minimálna. Prácu môžeme napísať v tvare integrálu:
![]() (6)
(6)
Z rovníc (5) pre D1 a D2 dostaneme nasledujúce vzťahy:
![]() (7)
(7)
Po dosadení vzťahov pre D1 a D2 do vzťahu (6) dostaneme:
 (8)
(8)
Našou úlohou je nájsť také funkcie φ1(t) a φ2(t),
pre ktoré nadobúda integrál (8) minimálnu hodnotu. Pri hľadaní stacionárneho
riešenia funkcionálu závislého od neznámej funkcie y, a jej
derivácií až do n-tého rádu  , pomocou variačného
, pomocou variačného
Obr. 2. Ilustrácia začiatočnej a koncovej polohy ramien manipulátora.
počtu dostaneme diferenciálnu rovnicu n-tého rádu [4]
![]() (9)
(9)
V našom prípade stacionárne riešenie funkcionálu (8) dostaneme pre funkcie φ1(t) a φ2(t), ktoré sú riešením diferenciálnych rovníc druhého rádu:
![]() (10)
(10)
Riešenie týchto rovníc môžeme napísať v tvare:
![]() (11)
(11)
Konštanty ω10 a ω20 určíme z okrajových podmienok polohy manipulátora v čase t=0 a t=T Obr. 2.
![]() ,
, ![]() (12),
(12),
kde ![]() ,
, ![]() ,
, ![]() ,
, ![]()
4. Aplikácia
Na ilustráciu uvedieme konkrétny príklad. Uvažujme dva rôzne pohyby manipulátora z rovnakej štartovacej polohy a končiaci v tej istej koncovej polohe, ale po dvoch rôznych trajektóriách. Jedna trajektória bude optimálna (A) vzhľadom na straty trením podľa rovnice (9), druhá mierne odlišná (B). Pre obe tieto trajektórie vypočítame, koľko energie do systému dodáme a aká časť z tejto energie sa premení na straty spôsobené trením. Stratami nazveme tú časť energie, ktorá sa spotrebovala trením a vypočítame ju ako celkovú prácu vykonanú po trajektórii zmenšenú o zmenu kinetickej a potenciálnej energie medzi koncovým a začiatočným bodom trajektórie.
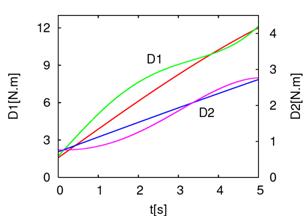
Obr. 3. Momenty síl, ktorými pôsobia motory na ramená pri premiestňovaní manipulátora. Pre optimálnu trajektóriu (A) sú momenty zobrazené červenou a modrou farbou, pre trajektóriu (B) zelenou a fialovou farbou.
Základná charakteristika ramien manipulátora a vypočítané hodnoty energií pre dve rôzne trajektórie pohybu manipulátora sú uvedené v Tab. 1.
Tab. 1. Základne charakteristiky pohybu manipulátora pre optimálny pohyb (A) a neoptimálny pohyb (B)
|
Trajektória |
A |
B |
|
Štartovacia poloha ramien manipulátora φ10, φ20 (º) |
0, 0 |
0, 0 |
|
Konečná poloha ramien manipulátora φ1T, φ2T (º) |
20, 44 |
20, 44 |
|
Čas trvania pohybu manipulátora T (s) |
5.0 |
5.0 |
|
Hmotnosť 1. ramena m1 (kg) |
1.0 |
1.0 |
|
Hmotnosť 2. ramena m2 (kg) |
1.2 |
1.2 |
|
Dĺžka 1. ramena l1 (m) |
0.9 |
0.9 |
|
Dĺžka 2. ramena l2 (m) |
1.0 |
1.0 |
|
Energia dodaná do systému (J) |
6.028854 |
6.133189 |
|
Energia, ktorá sa spotrebovala trením (J) |
1.463430 |
1.567764 |
|
Energia, ktorá sa ušetrí pri optimálnom pohybe (%) |
6.65 |
|
Na Obr. 3. sú zobrazené priebehy momentov síl, ktorými pôsobia motory na ramená manipulátora pri dvoch rôznych pohyboch. Na Obr. 4. sú priebehy zovšeobecnených súradníc ramien pri pohybe manipulátora.
5. Záver
Na základe výsledkov získaných variačnou metódou sme prišli k záveru, že optimálny pohyb ramien manipulátora s ohľadom na minimalizáciu strát trením je taký, že uhlové rýchlosti ramien ω1 a ω2 sú konštantné. Optimálne momenty síl, ktorými pôsobia motory na ramená manipulátora sú určené rovnicou (7).
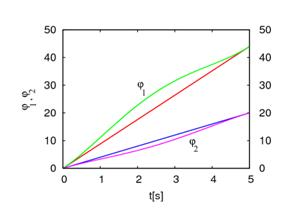
Obr. 4. Časový vývoj zovšeobecnených súradníc ramien pri pohybe manipulátora zo štartovacej do konečnej polohy. Optimálna trajektória (A) je zobrazená červenou a modrou farbou, trajektória (B) zelenou a fialovou farbou.
6. Literatúra
[1] Landau, L., Lifšic, J., “Úvod do teoretickej fyziky 1”, ALFA, 1980
[2] Dávid, A., “Numerické metódy na osobnom počítači”, ALFA, 1988
[3] Feynman, R., Leighton, R., Sands, M., “Feynmanove prednášky z fyziky 3”, ALFA, 1988
[4] Lavrenťjev, M., Ljusternik, L., “Kurs variačního počtu”, Praha, 1952